Library of Approaches
Design of anthropomorphic, tendon-driven, rigid-sequential robot hands - a collection of approaches in morphological boxes
What are design fields of interest of roboticists? ("FoIs")
How have robotocists solved those Fields? ("Principal Solutions" (PSs))
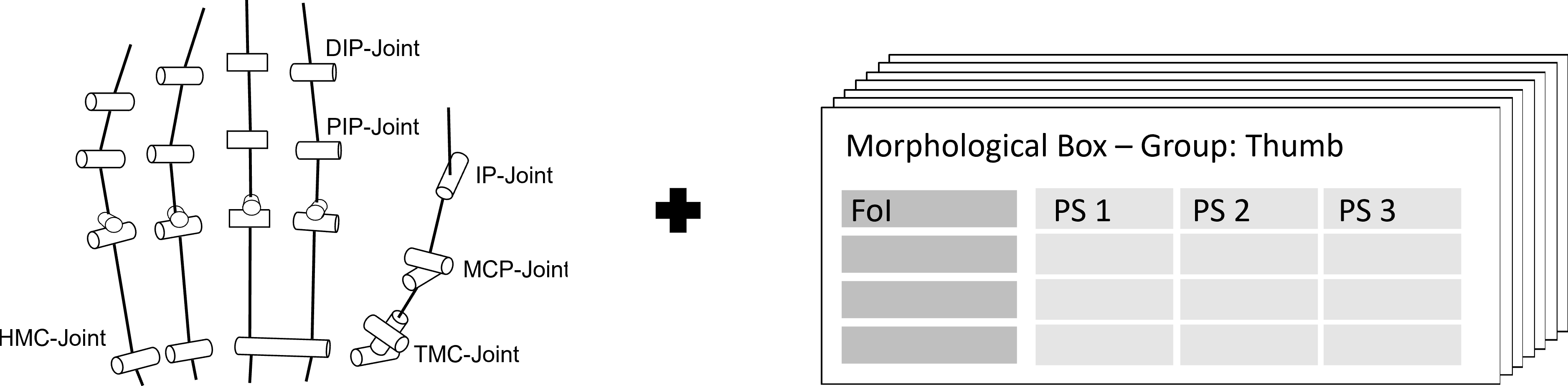
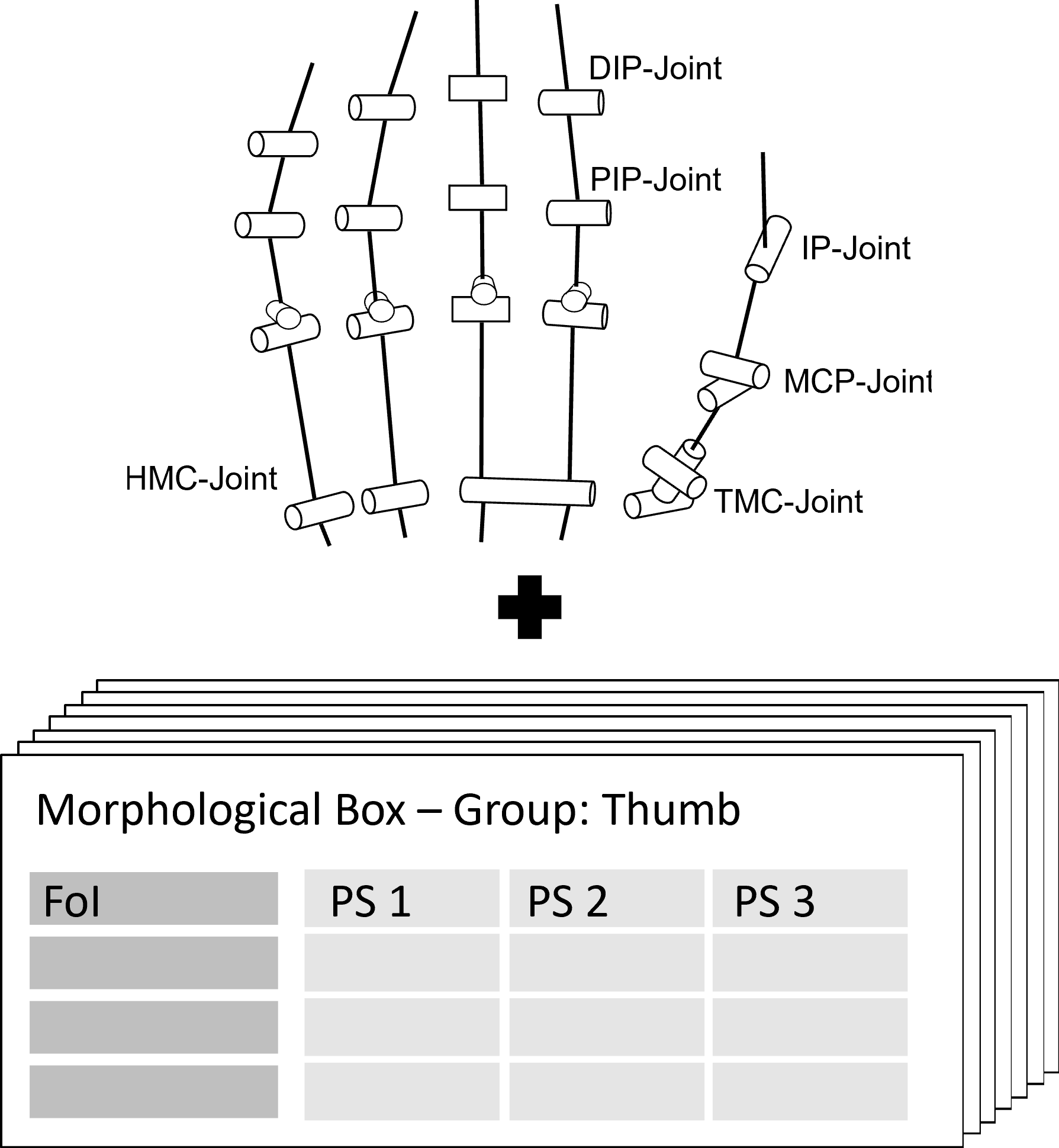
The PS are defined in terminology to be applied to an initially chosen joint configuration
Cite our work
doi coming soon...Message us for collaboration
Email: gossen@igmr.rwth-aachen.de